 Bisher wurden eine Menge Details über die Kompassdeviation beschrieben. Im folgenden wird eine einfache Methode zur Erstellung einer Deviationstabelle und dem Zeichnen einer Deviationskurve vorgestellt.
Bisher wurden eine Menge Details über die Kompassdeviation beschrieben. Im folgenden wird eine einfache Methode zur Erstellung einer Deviationstabelle und dem Zeichnen einer Deviationskurve vorgestellt.
In Teil 1 wurde hypothetisch angenommen, dass man die Deviation ermitteln kann, wenn man eine Vergleichsmessung mit und ohne Deviation durchführt. Natürlich kann man die Deviation in der Praxis nicht wirklich „abschalten“, aber man kann einen Vergleich mit deviationsfreien Messungen bzw. Messgeräten anstellen.
Das Einfachste ist die Verwendung eines GPS-Gerätes. Ein GPS ermittelt mithilfe umlaufender Satelliten in regelmäßigen Abständen die aktuelle (Schiffs-)Position und errechnet den Kurs aus aufeinander folgenden Positionen. Die Positionen beziehen sich auf ein geografisches Bezugssystem (i.d.R. WGS84) und somit auch der errechnete Kurs. Der Kurs wird als rechtweisender Kurs rwK (engl. true course TC) bezeichnet, genauer gesagt als Kurs über Grund KüG (engl. course over ground COG). Dieser Kurs entspricht dem Kartenkurs (KaK).
Schritt 1: Messen
Grundvoraussetzungen für die Messung sind:
- Möglichst windstill (höchstens 2 Bft).
- Keine Strömung.
- GPS-Gerät, Papier, Bleistift.
Zur Erstellung einer vollständigen Deviationstabelle werden zuerst Messungen alle 45° (4 Strich) durchgeführt.[1. Natürlich können auch kleinere Messabstände gewählt werden, das verbessert die Genauigkeit.]
Man fährt mit möglichst hoher Geschwindigkeit einen fixen Kurs nach Steuerkompass, z.B. 000° (Nord). Liegt der Kurs exakt an, liest man am GPS den rwK (COG) ab, und notiert beide Werte (Kompasskurs und GPS-Kurs).
Nun ändert man den Kurs um 45° und liest wieder am GPS den passenden rwK ab., usw.
Am Ende hat man acht Messungen durchgeführt und die Zahlen notiert. Besonders wichtig während des Ablesens am GPS ist, dass der Kurs absolut gerade ist und sich das Boot keinesfalls nach Steuerbord oder Backbord dreht. Die Kurs-Anzeige am GPS ist in der Regel digital und springt daher etwas hin und her. Man muss einen Mittelwert schätzen, deshalb ist es so wichtig, dass man währenddessen exakt geradlinig fährt.
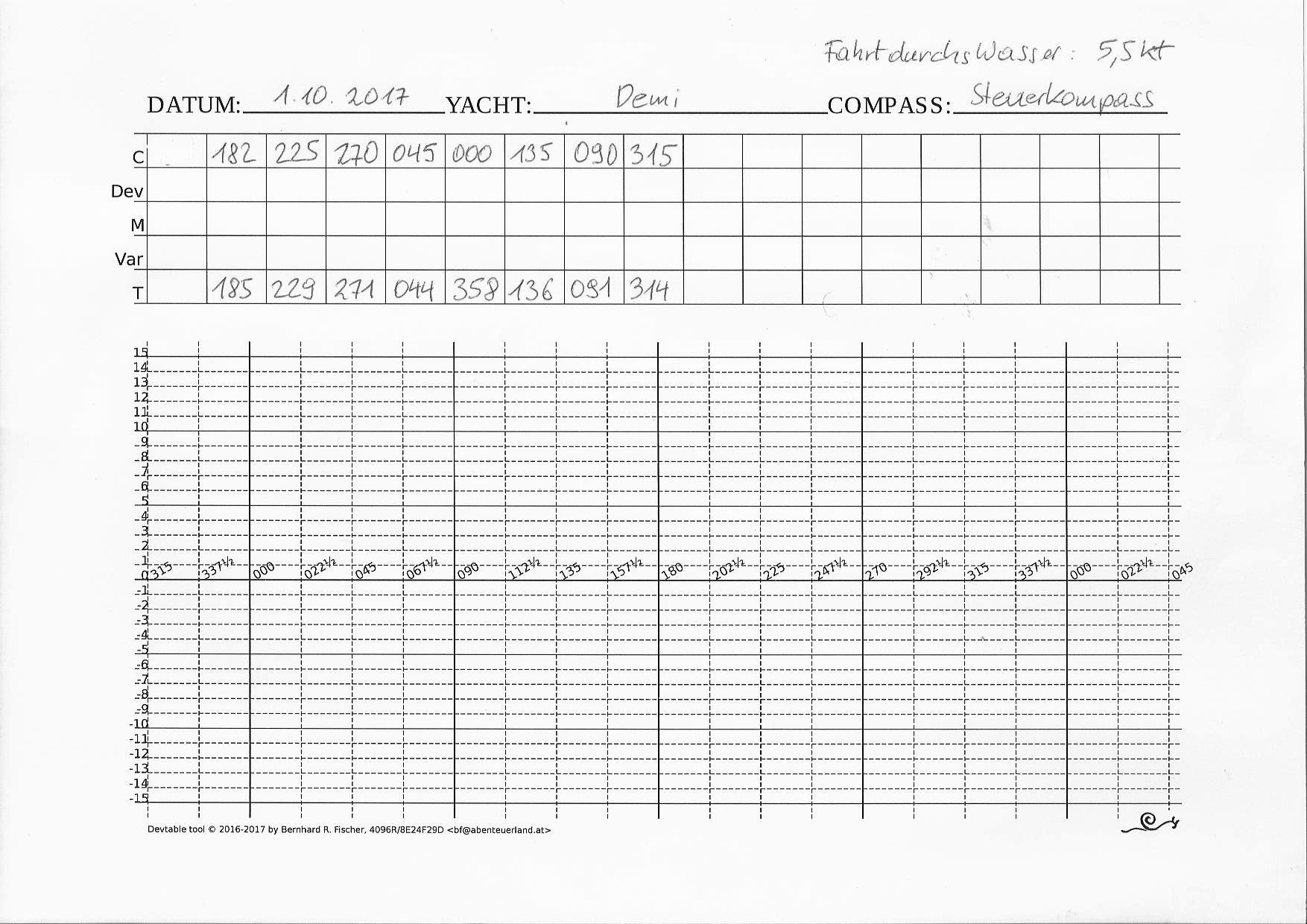
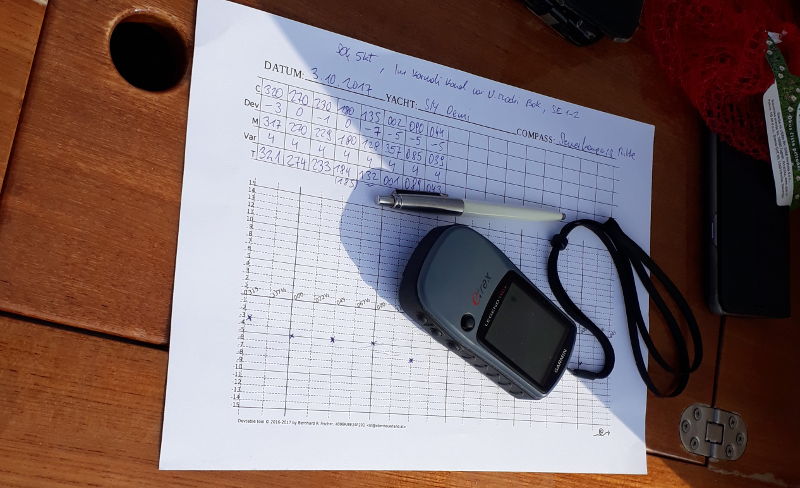
Abb. 1: Deviationstabelle mit Messwerten.
Abb. 1 zeigt eine Tabelle nach diesen acht Messungen. In der ersten Zeile (C) ist der Kompasskurs eingetragen, in der letzten Zeile (T) der vom GPS abgelesene Kurs.
Schritt 2: Deviation ausrechnen
Wie im vorangegangenen Artikel über die Deviation bereits beschrieben, besteht die Differenz zwischen Kompasskurs und Kartenkurs aus zumindest vier Beschickungen:
- Deviation
- Deklination (Missweisung)
- Beschickung für Wind
- Beschickung für Strom
Die letzten beiden können außer acht gelassen werden (d.h. sie sind 0), sofern die Messung tatsächlich bei (nahezu) Windstille und in einem strömungsfreien Gebiet durchgeführt wurde.
Die magnetische Missweisung hängt vom Seegebiet ab und ist bekannt (s. »Schiffskompass und Deviation, Teil 2«), man kann sie aus der Seekarte herauslesen.
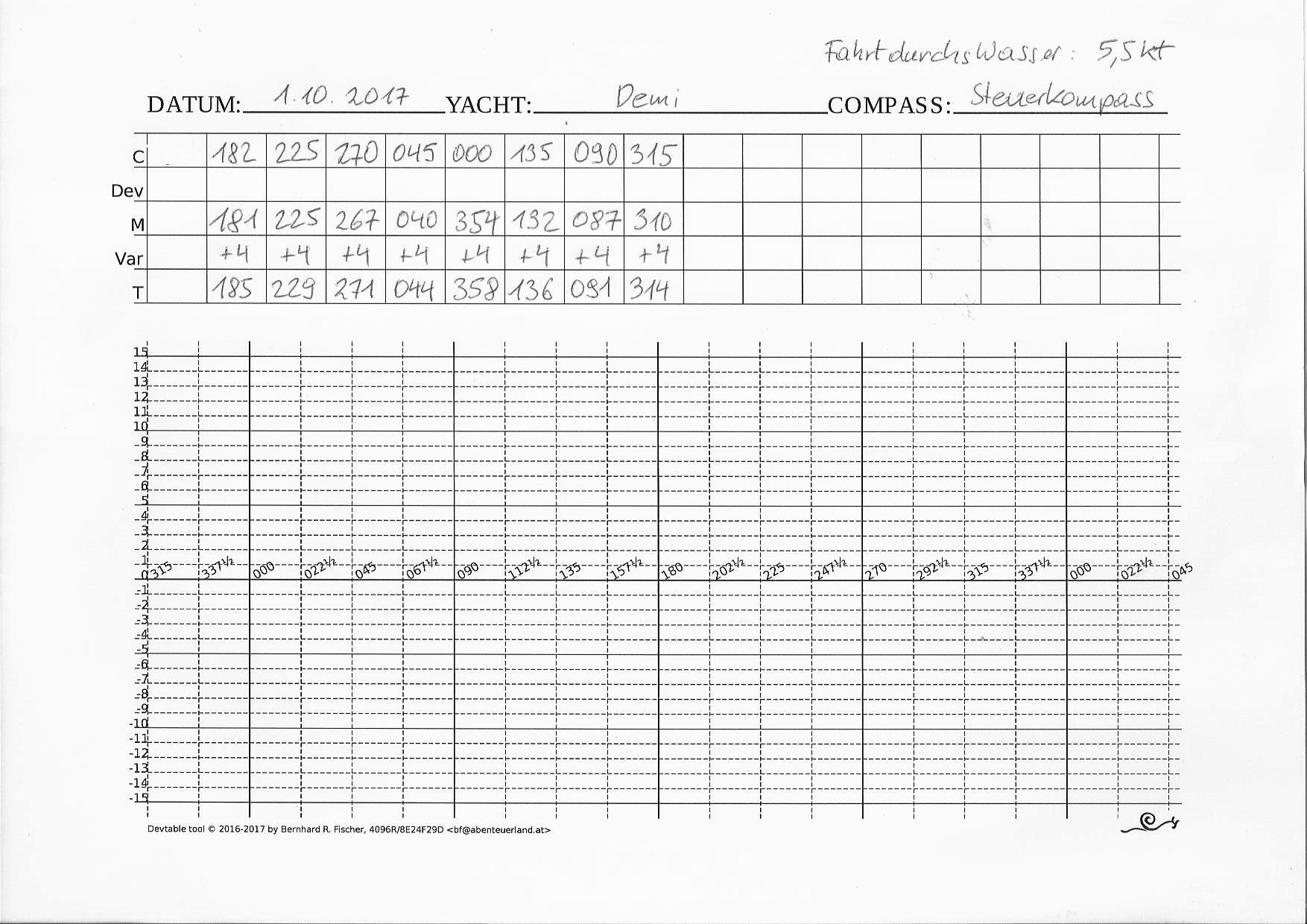
Abb. 2: Berücksichtigung der Missweisung.
Die Messungen aus Abb. 1 der Segelyacht Demi wurden in der Adria durchgeführt, dort beträgt die Missweisung derzeit ca. 4° Ost. Östliche Missweisungen werden positiv berücksichtigt, westliche negativ (»Westen ist weniger«). Abb 2. zeigt, wie die Deklination eingerechnet wird. Als Zwischenrechnung erhält man den sog. missweisenden Kurs mwK (engl. magnetic course). Nun bleibt in der Rechnung nur noch die Deviation übrig.
Deviationskurve ermitteln
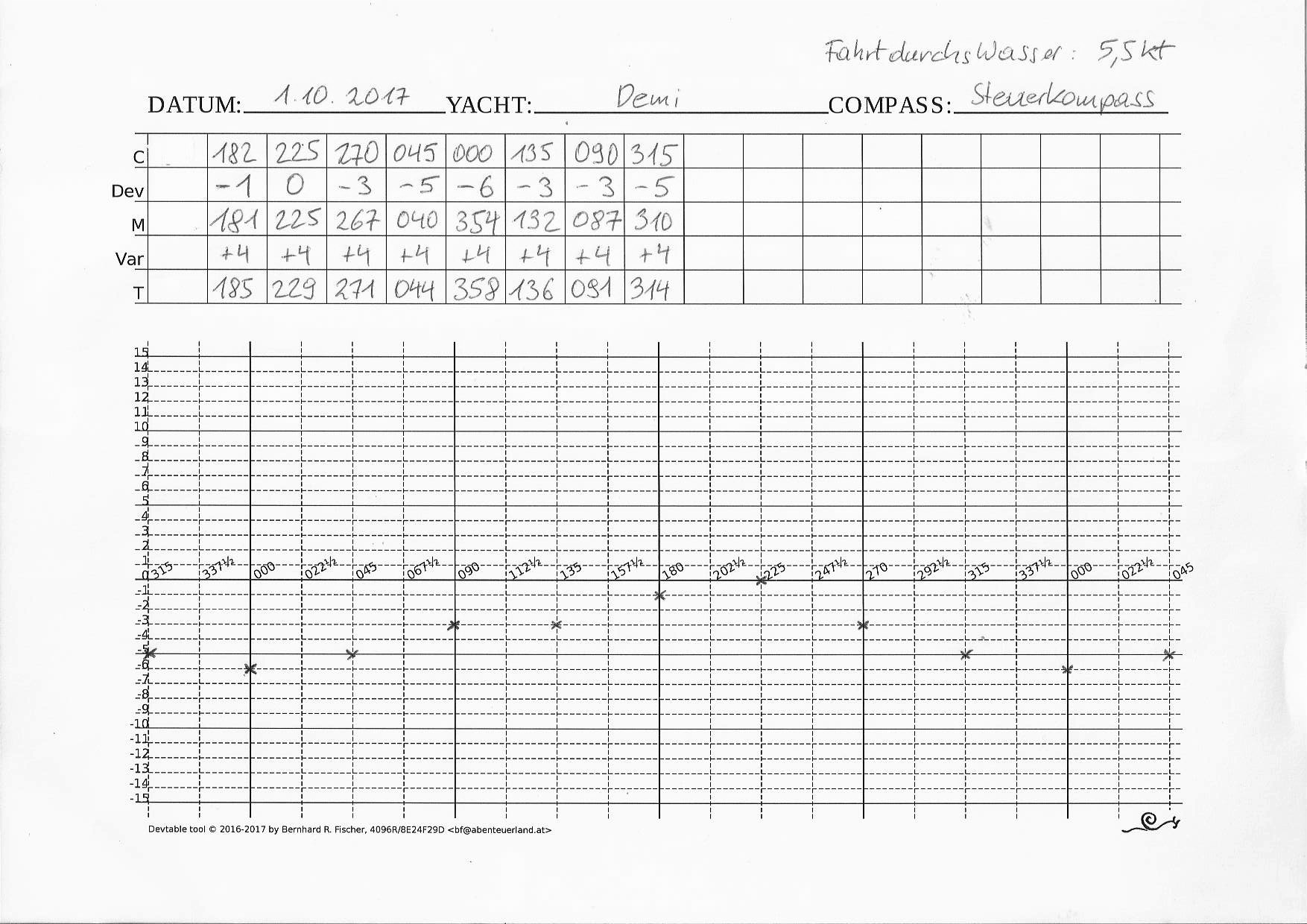
Abb. 3: Deviation ausrechnen und ins Diagramm übertragen.
Die Werte lassen sich durch die Differenz zwischen Kompasskurs und missweisendem Kurs leicht ausrechnen. Da man Deviationswerte nicht nur für die acht gemessenen, sondern für alle Kurse benötigt, werden die Werte, wie in Abb. 3 gezeigt, in ein Diagramm übertragen.
Die Deviationskurve muss ungefähr eine Sinuskurve ergeben. Das sollte sich optisch bereits auf den ersten Blick aus den übertragenen acht Punkten ergeben (s. Abb. 3). Sollten einzelne Punkte stark abweichen, so handelt es sich meist um einen Rechenfehler. Ggf. müssen einzelne Messungen wiederholt werden, oder zusätzliche Kurse zwischen den bereits vorhandenen Messpunkten ermittelt werden. Stimmt das Bild ungefähr kann nun eine Kurve zwischen die Messpunkte „hineingeschätzt“ werden.
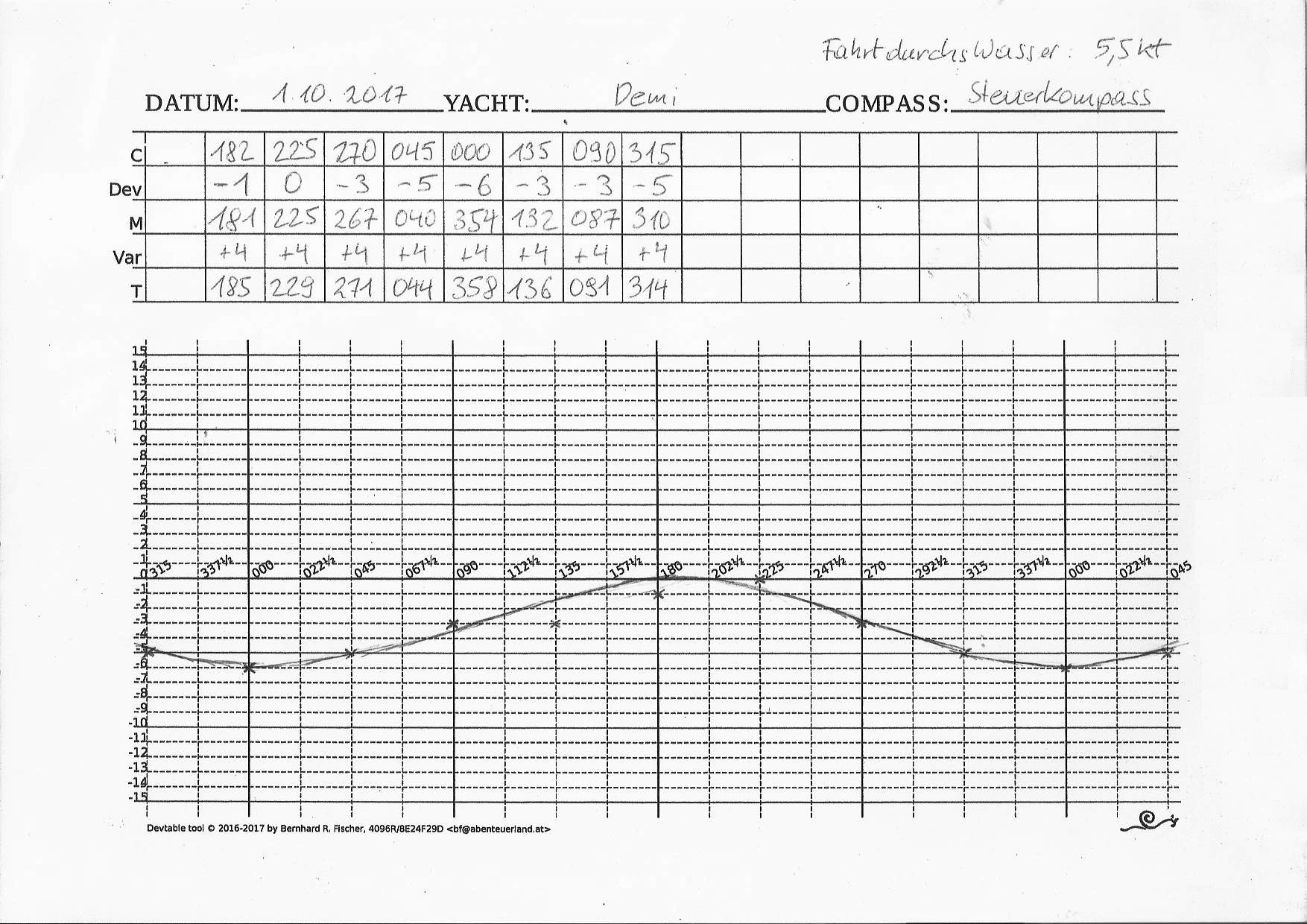
Abb. 4: Händisch erstellte Deviationskurve.
Abb. 4 zeigt das Endergebnis mit einer händisch eingezeichneten Kurve. Damit kann man nun auch für alle andere Kurse die entsprechende Umrechnung zwischen Kompass- und Kartenkurs durchführen.
Rechenbeispiel
Angenommen der Kompass zeigt 115°. Wie lautet der entsprechende Kartenkurs?
Mit Hilfe der Kurve liest man bei 115° die Deviation ab. Das sind ca. -2°. Daraus ergibt sich ein missweisender Kurs von 113° (= 115 – 2). Anschließend muss die Missweisung berücksichtigt werden, das sind in der Adria +4°. Der Kartenkurs ergibt sich daher zu 117° (= 113 + 4).[1. Das gilt nach wie vor unter der Voraussetzung, dass keine Strömung besteht und das Boot nicht durch Wind (z.B. beim Segeln) seitlich abgetrieben wieder.]
Übungsaufgabe: Aus der Karte liest du den 235°. Welchen Kurs musst du am Kompass steuern?
Fehlerquelle GPS-Einstellung
Achtung! Auf vielen GPS-Kartenplottern kann man die Missweisung (engl. magnetic variation) einstellen. Im Setup-Menü findet man meist die Auswahl zwischen “manuel” und “automatic“. Im ersten Fall kann man zusätzlich die Grad einstellen.
Stelle vor der Messung sicher, dass die Missweisung auf “manuell/0°” eingestellt ist, da andernfalls die Missweisung dadurch in der Rechentabelle doppelt berücksichtigt würde!
Fortsetzung folgt
Im nächsten Artikel werden wir die Genauigkeit dieser Methode, das Aussehen der Kurve etwas genauer unter die Lupe nehmen, sowie ein paar mathematische Hilfsmittel vorstellen, um das „Kurvenschätzen“ zu vereinfachen und zu verbessern.


8 Kommentare
Robert · 21. August 2018 um 16:55
Sehr hilfreich, danke für den Artikel.
Wann kommt Teil 4?
eagle · 22. August 2018 um 08:37
*schlechtesgewissen* …. ja, ich weiß, Teil 4 ist längst überfällig. Kommt aber bestimmt noch! Habe gerade einen Stau in meiner Artikelwarteschlange.
Sonja Lischka · 12. Juli 2023 um 10:25
Hallo,
Ich habe eine Ablenkungstabelle und das Diagramm erstellt. In welchem Winkel muss ich jetzt die parallelen ziehen, damit ich daraus schräg die missweisenden Kurse ablesen kann um eine Steuertafel zu erstellen? Übermorgen machen wir SSS Prüfung mit einem eigenen Boot. Ich würde mich sehr über eine schnelle Antwort freuen. Danke
Bernhard Fischer · 12. Juli 2023 um 10:50
Hi Sonja!
Welche Parallelen meinst du denn?
Du kannst mich gerne per Email kontaktieren, ist einfacher als hier.
Liebe Grüße,
Bernhards
Adam · 10. September 2018 um 11:41
Schöner Artikel, insb. auch die (wichtige) Fehlerbetrachtung in Teil 4, danke dafür. Was mir dabei durch den Kopf ging ist, dass man die GPS-Daten mitloggen sollte (NMEA-Log des Bord-GPS oder eines Hand-GPS aufzeichnen). Dann ein großes Polygon (Achteck oder mehr) fahren und sich für jede Kante den gesteuerten Magnetkompasskurs notieren. Ggf. steht im NMEA-Log auch der vom elektronischen Magnetkompass der Bordelektronik ermittelte Kurs drin, was i.d.R. aber ein anderer ist als der, der vom rein analogen Kompass angezeigt wird.
Aus diesem Log könnte man dann per Software eine Deviationstabelle/-Kurve erstellen. Da man mehr Daten zur Verfügung hat, kann mit einem Griff in die Trickkiste der Statistik etwas mehr Genauigkeit und Information über den Messfehler herausholen (Fit der Deviationskurve). Und die Erstellung der Tabelle/Kurve erfolgt automatisiert, kann man sich dann ausdrucken.
Ich hätte da Lust, mal sowas zu programmieren. Hat jemand entsprechende Logdaten?
Kann man eigentlich den elektronischen Magnetkompass kompensieren? D.h. in die Software der Bordelektronik eine Deviationstabelle eingeben, so dass die Bordinstrumente magnetisch Nord anzeigen, bzw. sogar bei bekannter Missweisung (eingebbar oder Software enthält ein world magnetig model) rechtweisend Nord anzeigen?
eagle · 11. September 2018 um 17:47
Das mit der Software ist prinzipiell eine gute Idee finde ich. Macht die Sache aber natürlich komplizierter. Das GPS-Verfahren ist vom Prinzip absichtlich so einfach, damit jeder mit einfachsten Mittel eine halbwegs genaue Tabelle erstellen kann.
Elektronische Kompasse sind i.d.R. Fluxgate-Kompasse, die können sich selbst kompensieren, da braucht man keine Deviationstabelle.
Gunther Troost · 19. November 2023 um 07:26
Ich habe mich rein physikalisch mit der Deviation beschäftigt. Dabei bion ich auf die folgenden Zusammenhänge gestoßen.
Das Erdmagnetfeld ist das äußere Feld, dazu kommt ein zusätzliches Feld, das durch das Schiff erzeugt wird, welches beim Kompss dann die Abweichung erzeugt. Nehmen wir die Stärke des Erdmagnetfeldes mit 1 an und die Stärke des Bootsmagnetfeldes mit f. Dann ist die Abweichung des Kompasses wie folgt zu berechnen:
Dev = Arctan(f*sin(W+dW)/(1+f*cos(W+dW)
Dabei sind Dev = Abweichung (Deviation)
W = Kurs oder Lage des Schiffes
dW = Richtung des Abweichungsvektors des Schiffes
Fährt das Schiff in Richtung -dW (z.B. bei dW 0 20° in Richtung 340°, so ist die Abweichung genau kompensiert
Das Ganze ergibt bei kleinen Werten von f (< 0,1) fast eine Sinuskurve. Genaugenommen benötigt man nur dW und f, um die gesamte Tabelle zu erstellen. Allerdings könnte es sein, dass diese Werte nicht konstant sind, weil z.B. elektrische Ströme, die ja auch Magnetefelder erzeugen, sich ändern, oder irgendwelche beweglichen, magnetischen Gegenstände (z.B. Baum des Großsegels wegen der Beschläge) diese Werte ändern, weil deren Lage sich ändern.
Fehlerquellen bei der GPS-Deviationsmessung - Teil 4 - freeskippers.at · 30. August 2018 um 12:07
[…] Teil 3 dieser Artikelreihe wurde die Deviationstabelle der Segelyacht Demi gezeigt. Die Kurve ist um ca. 3° nach unten […]